Publicatiedatum: 31 juli 2020 Bijgewerkte datum: 29 januari 2024
De trillingsdempende koppeling met hoge stijfheid

De trillingsdempende koppeling met hoge stijfheid
Er worden veel soorten askoppelingen gebruikt met verschillende productieapparatuur, wat een hoge productiviteit vereist.Koppelingen met hoge torsiestijfheid, zoals schijftype (Pic1) en balgtype (Pic2), worden voornamelijk gebruikt in toepassingen die een hoge positioneringsnauwkeurigheid vereisen. Aan de andere kant neemt de laatste tijd de snelheidsresponsfrequentie van servomotoren toe (Fig1), de trillingen door jagen komen vaak voor, met als gevolg dat we de motor niet kunnen gebruiken met zijn maximale prestaties. Daarom moeten we de prestaties onderdrukken om de trillingen te verminderen bij gebruik van volledig metalen koppelingen. Er zijn koppelingen van het elastomeertype (Pic3) die elastomeren hebben die trillingen absorberen met rubber en de motorprestaties niet onderdrukken. Deze koppelingen van het elastomeertype hebben echter een probleem; ze hebben een lagere torsiestijfheid in vergelijking met het type schijf of balg. Als gevolg hiervan is het type elastomeer soms niet goed voor toepassingen met hoge snijweerstand, zoals spindels van werktuigmachines.
Daarom is een groot doel voor koppelingsfabrikanten om een koppeling te bieden die een hoge torsiestijfheid kan behouden en trillingsabsorptie in dezelfde koppeling mogelijk maakt. In het verleden moest men kiezen tussen een hoge torsiestijfheid en een trillingsabsorptiefunctie.




● Pic4. NBK “XGHW” koppelingen
Het schijftype dat trillingen absorbeert XGHW-reeks

Constructie van trillingsdempende koppeling met hoge stijfheid
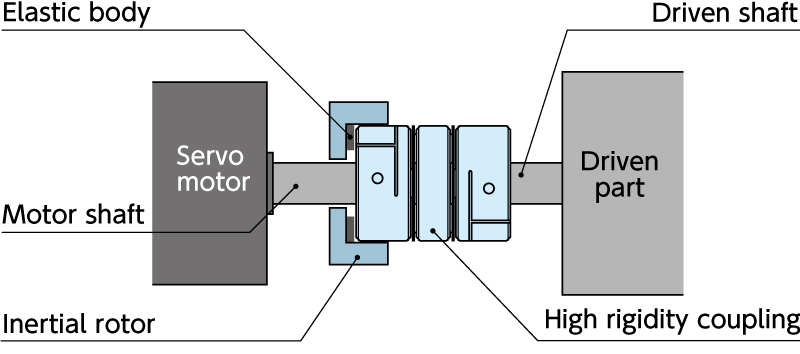
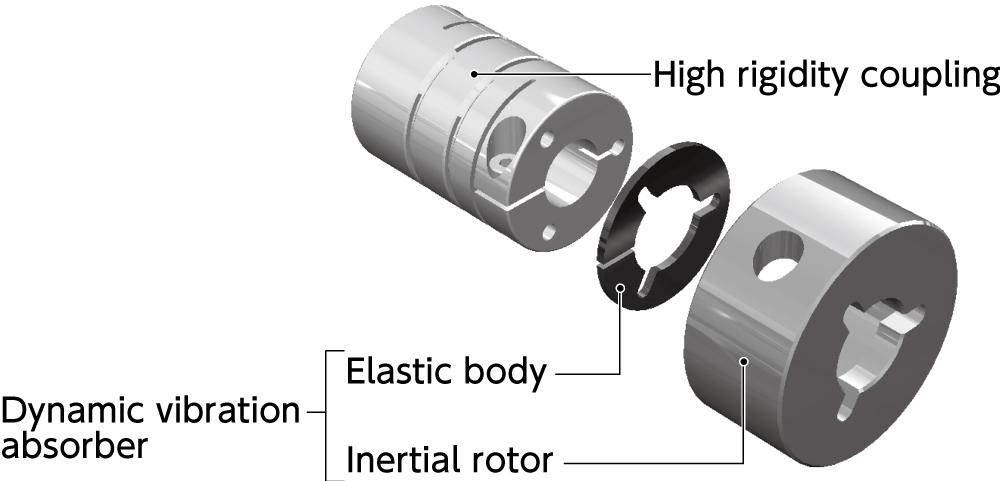
De dynamische trillingsdemper is een mechanisme dat de trilling van de koppeling onderdrukt wanneer deze wordt beïnvloed door het resonantiefenomeen door de vibrator (koppelingslichaam) en de aanvullende traagheidsrotor door het elastische lichaam te verbinden.De volgende afbeelding 2 toont de constructie.
● Afb2. Bouw van "XGHW"
Effecten van "XGHW"
Als we de winst vergroten, kan er gejaagd worden; het is een voorbeeld van een resonantieverschijnsel van rotatiefactoren bij het gebruik van servomotoren. Het versterkingsniveau dat jagen optreedt, is afhankelijk van het type koppeling. De volgende tabel 1 toont het resultaat van de limietversterking (de maximale versterking die volledig kan worden gecontroleerd zonder te slingeren), de stabilisatietijd (de tijdspanne tussen het motorpositioneringscommando en de werkelijke stoptijd) en torsiestijfheid voor elke koppeling.
● Tabel1. Resultaat van elk koppelingstype (referentie)
| Versterking beperken * 1 | Stabilisatietijd [ms] | Torsiestijfheid [N ・ m / rad] | |
|---|---|---|---|
Schijf met dynamische trillingsdemper |
32 | 8 | 300 |
Schijf  |
14 | 460 | 300 |
blaasbalg  |
24 | 34 | 170 |
Elastomeer  |
34 | 5 | 55 |
<Testomstandigheden>
Actuator: KR30H, THK
Servomotor: HG-KR13, Mitsubishi Electric
Laadgewicht: 3 kg (6,6 lb.)
Servo-aanpassing: MRConfigrator 2 Auto-afstemmingsmodus 2 (elk filter uitgeschakeld)
* 1: Limietwaarde van de automatische afstemmingsversterking die is ingesteld door de automatische afstemmingsmodus 2.
Koppelingen van het elastomeertype kunnen het optreden van jagen via trillingsabsorptie onderdrukken en de limietversterking meer doen toenemen, met als resultaat dat het de stabilisatietijd kan verkorten. Soms is het elastomeertype echter niet geschikt voor toepassingen met een hoog koppel, omdat hun torsiestijfheid lager is in vergelijking met schijfkoppelingen.
Aan de andere kant maakt "XGHW" het mogelijk om de versterking te verhogen op bijna hetzelfde niveau als het elastomeertype, terwijl de hoge torsiestijfheid behouden blijft, vergelijkbaar met het schijftype.
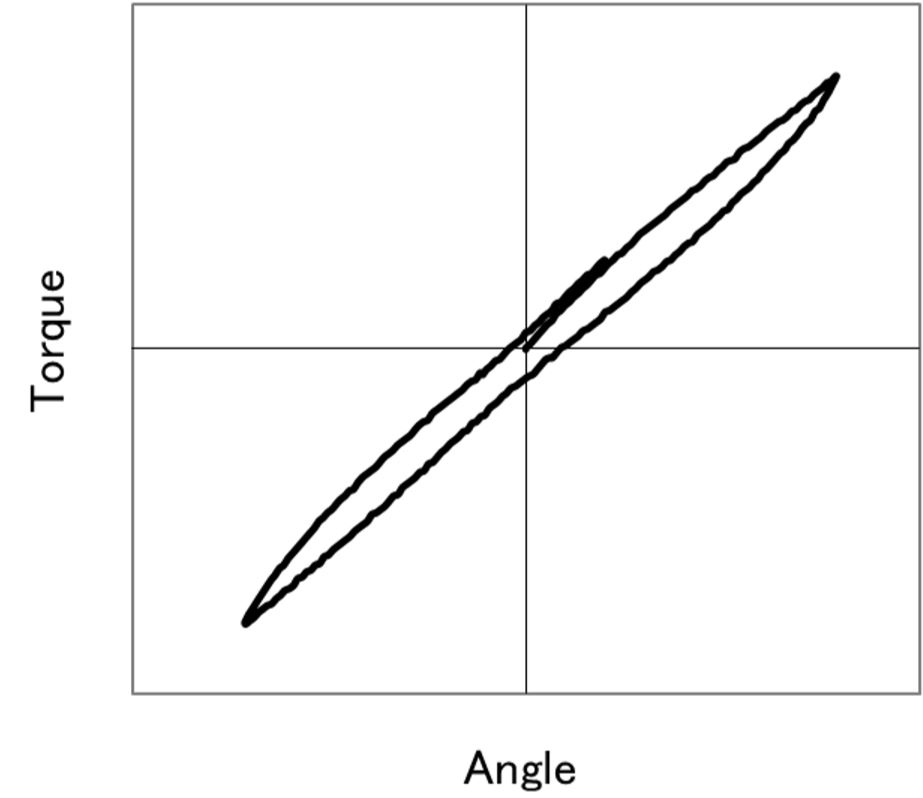
"XGHW" heeft een bijkomend effect dat de verloren beweging met betrekking tot koppelgeleiding onderdrukt omdat het niet door een elastisch lichaam zoals rubber gaat in de rotatiefactoren en er dus geen hysterese is (Fig3) die te zien is in het elastomeertype. Verloren beweging duidt op een toestand waarin een elastisch lichaam niet terugkeert naar de oorspronkelijke toestand, zelfs niet als de stroom wordt losgelaten. Dit komt doordat een deel van de kinetische energie verandert in thermische energie wanneer een elastisch lichaam van polymeren wordt vervormd. In bepaalde toepassingen kan het verlies van beweging leiden tot een verminderde positioneringsnauwkeurigheid.
● Afb.3. Vergelijking van statische torsiestijfheid
a) "XGHW"

b) Soort elastomeer

Gevolgtrekking
Bij gebruik van de "XGHW" -koppelingen in combinatie met werktuigmachines, is er een mogelijkheid om de afwerkingsnauwkeurigheid te verhogen door de trillingen te dempen terwijl de bewerkingsnauwkeurigheid behouden blijft bij het bewerken van hoge hardheid en kwetsbare materialen. Sinds kort wordt het gebruik van materialen zoals glas, keramiek en grafiet voor de behuizing van smartphones of productiemallen steeds gebruikelijker, en daarom raden we de "XGHW" -koppelingen voor Z-as van bewerkingsmachines aan.
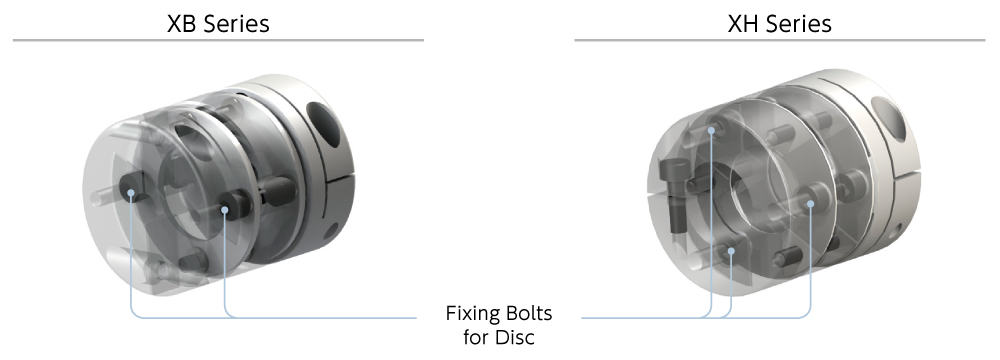
Veel gebruikers denken dat de buitendiameter van de XGHW groter zou zijn dan die van andere schijftypes vanwege de traagheidsrotor, maar dat is niet juist. U kunt een vergelijkbare buitendiameter behouden als uw huidige koppeling en hetzelfde toegestane koppel behouden, zelfs als deze een traagheidsrotor heeft vanwege het hogere nominale koppel van de XGHW (bijna 1,5 keer) vanwege de constructie. Het heeft drie bevestigingsbouten voor de schijven. Het gewone schijftype heeft slechts twee bouten. (Pic5). U kunt het werkelijke verschil zien aan de hand van de volgende tabel 2.
● Pic5. Vergelijking tussen Common Disk-type en "XGHW"
| Maker | Bedrijf A | NBK |
|---|---|---|
| P / N | N / A | XGHW-27C |
| Type | Schijf | Schijf met inartiële rotor |
| Houden | Het vastklemmen | Het vastklemmen |
| Materiaal | Aluminium | Aluminium |
| Buitendiameter (mm) | 26 | 27 |
| Lengte (mm) | 32.3 | 29,7 |
| Max. Rotatie (tpm) | 10.000 | 23.000 |
| Nominaal koppel (N ・ m) | 2 | 1.5 |
| Max. Laterale uitlijning (mm) | 0.15 | 0.12 |
| Max. Hoekafwijking (°) | 1 | 2 |
| Max. Axiale uitlijning (mm) | ± 0,16 | ± 0,2 |
NBK heeft een ander type koppeling met een hogere trillingsabsorptie, onze “XG2” koppelingen (Pic6), de stijfheid is iets lager dan “XGHW” maar kan ook hoge versterkingsniveaus mogelijk maken en daardoor de motorprestaties maximaliseren. Door de “XG2” te installeren kan een hoge productieproductiviteit worden bereikt wanneer een hoge stijfheid in de X- en Y-as niet nodig is.
NBK biedt nog een White Paper voor hun "XG2" -koppelingen, dus neem contact op met het NBK-team als u geïnteresseerd bent in het verkrijgen ervan.
● Pic6. NBK "XG2" -koppelingen / Hoogste vermogen tot trillingsabsorptie
High-gain rubberen koppelingen XGT2

Aanbevolen product
Flexibele koppelingen - Het type met Vibration-Absorption Capable Disk XGHW

High-gain rubberen koppelingen XGT2